Finding ways to apply the Agile approach to R&D project management
Udovichenko A. S.1
1 Санкт-Петербургский государственный университет
Download PDF | Downloads: 11
Journal paper
Creative Economy (РИНЦ, ВАК)
опубликовать статью | оформить подписку
Volume 19, Number 3 (March 2025)
Indexed in Russian Science Citation Index: https://elibrary.ru/item.asp?id=80571353
Abstract:
The agile approach, or flexible management of product development projects, originated in information technology. It is also being used in other industries because of its reputation for building strong and mutually beneficial relationships between the company and the consumers of its products. In practice, however, it is not easy to implement, since full implementation requires the transformation of the organization from a hierarchical structure to a network of interacting teams. In the literature they are called "swarm teams", which allows to talk about swarming social systems. Such a transformation is difficult and, by definition, meets with resistance from the management system. In R&D, there are also attempts to apply the agile approach to project management, since the successful implementation of scientific results in the economy can provide the largest flow of resources for the needs of scientific work.
In addition, the idea of flexibility corresponds to the effectiveness of scientific activity. At the same time, scientific organizations and corporate research structures are themselves often very hierarchical structures, which makes it difficult to fully implement the agile approach. The article considers the possibility of transferring the experience of building technical swarm systems to building team swarms in scientific organizations. It is concluded that it is possible to transfer rules and procedures from the technical to the social field, which can create conditions for the transformation of organizational culture, allowing the effective implementation of the agile approach to the management of scientific and technical projects.
Keywords: Agile, swarm intelligence, scientific and technological progress management, UAV swarm management
JEL-classification: O31, O32, O33
Введение
Agile-подход, как называют в литературе гибкое управление проектами, в настоящий момент имеет эпизодическое применение в случае проектов исследований и разработок [1]. Традиционные гибкие методы проектного управления основаны на трех законах agile [5]: законе организации работы в микрокомандах численностью от 5 до 9 человек, каждая из которых решает конкретную задачу, важную для потребителя продукта (закон микрокоманды). При этом постоянно производится коммуникация внутри и вне команды, обеспечивающая связь с потребителем результата работы команды. Приоритетом ставится не извлечение прибыли из продаж продукции, которая есть у компании, а разработка продукта, приносящего максимальную пользу для потребителя (закон потребителя) – внешнего или внутреннего (то есть, являющегося другой командой в той же самой организации). Наконец, команды разработчиков продуктов, которые работают на первых двух принципах, не являются изолированными островками внутри линейно управляемой организации, а составляют из себя сеть взаимодействующих команд, которые в том числе могут периодически обмениваться людьми и в любом случае ставят друг другу задачи (закон сети). Эти три закона логически связаны между собой, главным является второй (закон потребителя), подчиняющий всю разработку продукта интересам потребителя, а основным законом, от которого и зависит успех применения подхода, является третий (закон сети), который трансформирует организационную иерархию в сеть взаимодействующих команд [5].
Данный подход для разработки продуктов был первоначально разработан в отрасли информационных технологий и впервые опубликован в виде т.н. «Манифеста Agile» [13]. Поскольку данная статья предметом имеет управление проектами научных исследований и разработок, необходимо отметить, что научные проекты в узком смысле вообще не включают в себя разработку продуктов для продажи на рынке или поставок народному хозяйству. Они нацелены на генерацию новых знаний, и результаты научно-технической деятельности лишь в некоторых случаях и после существенных дополнительных доработок достигают уровня продукта, который может быть использован производственным или конечным потребителем. И в этом случае, после фактического внедрения этого результата в виде используемого продукта в экономику, научная деятельность по факту становится непосредственной производящей силой [30].
Это означает, что несмотря на специфику научных проектов, заключающуюся в том, что их производительная сила в конечном итоге зависит от преобразования новых знаний в продукт для поставки на рынок или в народное хозяйство – то есть инновационных проектов – основание для рассмотрения возможности применения agile-подхода есть. Поскольку хоть и опосредованно, через использование их результатов, эти проекты своей целью имеют создание продуктов для потребителей. Хотя временной разрыв между завершением научного проекта и началом инновационного может быть очень длительным [2]. Следовательно, тема возможностей применения agile-подхода в проектах научных исследований и разработок является актуальной.
В литературе отмечается ряд проблем применения гибких подходов к управлению проектами в научной сфере. В частности, сложности адаптации методологии к специфике исследований [21, 32]: длительные итерации с поучением обратной связи, так как научные эксперименты требуют месяцев и иногда лет, что делает невозможной применение практики из отрасли разработки программного обеспечения, когда ставится командная задача на 1-2 недели. Далее, грантовая система финансирования науки, предполагающая жесткую финансовую отчетность и сроки исполнения – это противоречит идее гибкости при управлении проектом. Помимо этого, не следует забывать возможность междисциплинарного характера проектов: если в команде объединены, например, физики, химики и биологи, то в этих отраслях науки различны практики по работе команд, то есть, требуется дополнительное время на достижение эффективного взаимодействия [6]. Ну и главное, сама организационная культура научных коллективов часто иерархична, что затрудняет выполнение требований «закона сети» [28]. Трудно оценивать прогресс команды: если в ИТ результат – это готовый работающий продукт, на научной стадии есть лишь знания, выраженные в виде публикаций. То есть, нужны новые метрики прогресса. Высокая неопределенность и риск получения отрицательного результата также осложняют координацию работы команд. Необходимость сочетать гибкость с жестким планированием крупных научных проектов (таких, например, как CERN), затрудняют возможности гибкого проектного менеджмента. Наконец, необходимость заранее планировать публикации и патентную активность противоречит итерационности при проведении проекта – гибкость, основанная на получении обратной связи от потребителя по промежуточным результатам, часто ведет к трансформации цели проекта.
Agile представляет собой гибкую методику, которая может дезорганизовать работу организации, если ее саму внедрять не гибко, а дословно так, как указано в литературе по использованию agile, за пределами сектора ИТ [16]. Далее. Процесс передачи технологий является ключевым при преобразовании результата научно-технического проекта в продукт. Подход Agile здесь может сыграть значительную роль, так как направлен на определяющую роль интересов потребителя – то есть реципиента технологии. Научная литература показывает, что в настоящее время изучаются передовые методы управления проектами, однако опыт показывает, что эти методы не пропагандируются на курсах повышения квалификации, поскольку на активных курсах изучаются более общие методы [27].
Среди высокотехнологичных отраслей экономики отметим сектор здравоохранения. Этот сектор является местом концентрации постоянных исследований, испытаний и внедрения новых продуктов. Там постепенно внедряются практики эффективного и гибкого управления проектами [11]. В упомянутом исследовании рекомендуется, чтобы учреждения здравоохранения уделяли приоритетное внимание развитию гибких компетенций посредством учебных программ.
Результаты отдельных исследований [12, 24] показали, что гибкие методы могут положительно влиять на эффективность, доступность и качество медицинского обслуживания. Более того, систематический обзор подтвердил важность условий успеха, таких как готовность организационного руководства к переходу от иерархии к работе сети команд, наличие собственно команд и навыков сотрудников разрабатывать продукты в таких условиях [37]. Это важнейшие элементы для успешного внедрения Agile. Одновременно поиск этих условий помогает выявить проблемы с готовностью организаций к гибкому внедрению.
Отметим также проекты, связанные с наукой об устойчивом развитии. Они направлены на достижение целей устойчивого развития Организации объединенных наций (ООН) и являются междисциплинарными. Междисциплинарные исследовательские проекты, связанные со сложными проблемами, могут потребовать подходов к управлению проектами, которые поддерживают обучение, адаптацию и инновации. Agile - это подход к управлению, который был разработан для содействия сотрудничеству, обучению, творчеству, инновациям и рефлексии. Благодаря этим качествам Agile может стать подходящим подходом к управлению такими междисциплинарными исследовательскими проектами [14].
Однако проблемы внедрения гибкого управления проектами, с которыми сталкиваются перечисленные отрасли, подсказывают, что было бы эффективнее осознанно применять принципы Agile на более раннем этапе. С одной стороны, Agile допускает адаптивность в формулировке цели проекта и нацелен на нее. С другой стороны, некоторые проблемы сложнее устранить на более позднем этапе. Особенно это относится к аспекту культуры. Как только сформировалась культура конкуренции, становится сложнее поддерживать сотрудничество. Это приводит к разочарованию внутри команды, которого можно было избежать.
В основе успеха лежит хорошая структуризация коммуникаций в команде и между командами. Необходимо хорошо объяснить процесс Agile, особенно если исследователи никогда ранее не использовали гибкий подход к управлению проектом. Конкуренция должна быть сведена к минимуму и заменена общей целью. В связи с необходимостью большей гибкости и адаптируемости исследований, связанных со сложными проблемами [34], руководители проектов могут интуитивно применять альтернативные способы организации проекта. Исследователи могут интуитивно применять гибкие методы проведения исследований, не зная о принципах Agile [21].
Исследование [17] содержит рекомендации о том, как применять оба подхода вместе (традиционный и гибкий), такие как стандартизация и использование шаблонов и процедур для удовлетворения требований проекта. Результаты также показывают, что приверженность роли проектного менеджмента очень важна для достижения успешных результатов. Участие высшего руководства и спонсоров проекта может внести решающий вклад в результаты проекта в целом. Регулярные консультации с заказчиками сокращают время и качество разработки. Стратегическое планирование, его наличие и качество, является фактором, который влияет на эффективность проектов научных исследований и разработок [33]. Совместная разработка стратегического плана улучшает координацию, сплоченность и совместное видение участниками. С другой стороны, критическим аспектом управления исследованиями, связанным с формированием команды или гибкими инструментами, является внутрикомандная борьба [36].
Хотя практика применения гибкого подхода (agile) к управлению научными проектами исследований и разработок, как видно из обзора литературы, изучена для различных стадий исследований и разработок и для разных отраслей, виден также и ряд пробелов, которые не позволяют в настоящее время вполне использовать потенциальные плюсы от применения agile-подхода в проектах генерации знаний. Во-первых, гибкость в управлении такими проектами необходимо сочетать с их структурированностью. То есть это должен быть особый способ применения гибкого подхода, учитывающий высокую степень неопределенности, характерную для научных проектов. Во-вторых, для оценки эффективности и результативности таких проектов нужна особая метрика: критерий «наличие работающего продукта», как в ИТ-проектах, не применим к научным проектам, которые реализуются на допродуктовой стадии. В-третьих, необходимо осмысление вопроса: решения по первым двум пунктам в разных отраслях (отраслях технических систем и социальных, прежде всего) являются несопоставимыми, или возможен межотраслевой обмен результатами?
Целью данного исследования является выявление потенциаьных областей для переноса опыта из сферы управления техническими роевыми системами в сферу социальных роевых систем. Цель определена тем, что научные проекты, в случае успешной реализации, в конечном итоге ведут к развитию производительных сил общества. В том числе производительных сил самой науки, которая является системой знаний общества. Значит, целесообразно изучить передовые достижения и перспективные разработки в области новейшей техники с точки зрения перенесения новых подходов в сферу организации научных проектов.
Данная работа претендует на новизну в том, что направлена на выявление рекомендаций по переносу новейшего опыта технических наук, экспериментирующих с гибким управлением, в область управления исследованиями и разработками. Рассматривается применение гибкого (agile) подхода к управлению научными проектами как способа превращения науки в производительную силу экономики. Это означает, что при обзоре литературы фокус исследования сконцентрирован на моменте преобразования результата научно-технической деятельности в рыночный продукт, и роли гибкого подхода в этом процессе. Такой подход дает возможность переносить опыт передовых технических наук в науку управления научно-техническим прогрессом (поскольку технические науки, решая технические проблемы, имеют дело с теми изделиями, которые уже являются продуктами. Иначе эти проблемы не актуальны).
Гипотеза в данном исследовании состоит в том, что возможно выявить решение вышеперечисленных проблем гибкого управления научными проектами на основе изучения достижений робототехники, занимающейся перспективными разработками в области роевого интеллекта. Для этого необходимо определить наиболее развивающуюся область технических роевых систем, и сравнить полученные результаты с пробелами в возможной области применения роевых технологий в управлении научными проектами.
Методология исследования основана на отборе, анализе и обобщении научных публикаций, а также данных учебников и материалов электронных ресурсов, соответствующих критериям, установленным согласно заданной теме. Поиск осуществлялся в системе Google Scholar. Использовались такие поисковые запросы, как «agile, роевой интеллект, роевое управление БПЛА, управление научно-техническим прогрессом» на русском и английском языках.
Передовой опыт построения технических роевых систем и возможность его применения для реализации agile-подхода в сфере управления проектами научных исследований и разработок
Важно подчеркнуть, что в данной работе мы не задаемся целью определить исчерпывающий или хотя бы существенный перечень принципов, которые установлены для управления техническими роевыми системами и которые мы рекомендуем напрямую перенести их в область управления социальными роевыми системами. Это бурно развивающаяся область, и сейчас важнее определить эффективный подход к анализу ее результатов, чем определять перечень этих результатов. С учетом этого, мы уточняем цель исследования и окончательно она звучит так: формулировка рекомендаций по использованию правил и практик, являющихся выводами исследований по техническим роевым системам для решения задач формирования роев команд в научно-технических проектах. То есть, мы ставим целью найти пути поиска инструментов трансформации иерархических научных организаций в сетевые, не относящиеся к организационной культуре (в то время как большинство исследований по успешным применениям agile-подхода к разработке продуктов связывают успех именно с культурой организации, создающей условия для реализации гибкого управления проектами [8].
Подход основан на следующем. Как было сказано выше, основным законом Agile, от реализации которого зависит успех применения подхода в целом, является закон сети. В литературе случай его успешного применения называют «рой команд» [5]. Основополагающим условием для достижения этого считается соответствующая культура организации, благоприятствующая гибкости в управлении и приоритете сетевого управления над бюрократизмом и иерархией [5]. В передовой технике роевыми называют технические системы, решающие широкий круг задач, отличающиеся высокой автономностью: нет ни программы, однозначно определяющей каждое действие робота, ни оператора-человека, делающего то же самое. Роевая техническая система получает задание, сформулированное в общем виде, и интегральный критерий ее решения, а в конкретных действиях принимает автономные решения. Алгоритмы управления роевыми системами построены как на имитации физических процессов, так и роевых процессов из животного мира, а не только из чисто абстрактных результатах развития математических методов. Это и дает возможность предположить, что опыт развития технических роевых систем применим и к человеческим системам, которыми являются научно-исследовательские коллективы.
Несложно понять, что прямое перенесение принципов роевого интеллекта на работу роев команд (сети команд) исследователей и разработчиков может привести не просто к лишенному смысла, а к противоположному целям управления научным проектом результату. Проиллюстрируем это на примере сопоставления подходов к безопасности полетов пилотируемой авиации (то есть системы, которая управляется людьми – пилотами и диспетчерами) и роевых беспилотных летательных аппаратов. Задачи обеспечения безопасности полетов здесь противоположны: если в первом случае во главу угла ставится недопущение падения летательного аппарата, чтобы не погибли пилоты и пассажиры, то во втором случае – недопущение падения БПЛА в месте, в котором могут пострадать люди и их имущество. По сути, это совершенно разный подход к обеспечению безопасности полетов (хотя и не противоположный). Это нужно понимать, исследуя вопрос о применении других принципов роевого интеллекта в человеческих системах.
То есть, технические закономерности могут служить инструментом для выделения цели и задач анализа, но их применение требует адаптации к закономерностям человеческого поведения. С другой стороны, комбинация точности технических методов с гибкостью социальных предметов исследования могут позволить выявить интересные пути решения сложных социальных задач.
Так как же нам следует достичь этой необходимой для социальных предметов исследования гибкости? В данной работе мы исходим из того, что ключевые условия здесь таковы: адаптивность к изменениям условий (критерий 1), прозрачная коммуникация (критерий 2), управление рисками (критерий 3) и интеграция междисциплинарных знаний (критерий 4). Критерии взяты из работы [42]. Также, важно обеспечить независимость от политической ангажированности [7]. С этими критериями мы будем сравнивать результаты обобщения знаний из области управления техническими роевыми системами, чтобы делать заключение о целесообразности их применения для расширения принципа роевого управления командами исследователей в научных проектах. То есть, в конечном итоге – для применения agile-подхода к управлению научными проектами. Сначала для этого нам нужно сделать выборку соответствующих достижений в области науки роевого управления техническими системами. Самой бурно развивающейся из них является сейчас сфера БПЛА – беспилотных летательных аппаратов [9].
Статистика платформы IEEE (Institute of Electrical and Electronics Engineers, некоммерческой инженерная ассоциация, разрабатывающая широко применяемые в мире стандарты по радиоэлектронике, электротехнике и аппаратному обеспечению вычислительных систем и сетей) показывает, что с 2019 по 2024 год опубликовано в общей сложности 398 статей и документов, связанных с ключевым словом “роевое управление БПЛА”. В том числе 269 — материалы конференций, 118 — статьи в журналах, 7 — статьи с ранним доступом и 4 — статьи в журналах смежных научных областей. Таким образом, что тема “роевое управление БПЛА” становится важной в научных конференциях и журналах. Данные приведены в таблице 1:
Таблица 1 – Данные с платформы IEEE о росте количества статей по роевому управлению БПЛА на 31 декабря 2024 года
|
Платформа
|
IEEE
| ||||
|
Вид результата
|
Конференционная статья
|
Журнальная статья
|
EAA
|
M
|
Суммарно
|
|
2019
|
28
|
11
|
0
|
1
|
40
|
|
2020
|
43
|
11
|
0
|
0
|
54
|
|
2021
|
39
|
9
|
0
|
2
|
50
|
|
2022
|
39
|
13
|
0
|
0
|
52
|
|
2023
|
79
|
25
|
0
|
0
|
104
|
|
2024
|
56
|
34
|
7
|
1
|
98
|
|
Всего
|
|
|
|
|
398
|
Помимо количественной составляющей, рассмотрим качество и уровень исследований. По материалам платформы IEEE были рассмотрены 125 научных публикаций. Из них 27% опубликованы в журнальных изданиях категории Q1, что означает о высокий уровень значимости и качества публикаций. 5% материалов опубликованы в журналах категории Q2, а 19% — категории Q3, что иллюстрирует широкий охват научных источников. Значительная часть, 41%, составляют статьи, представленные на научных конференциях, подчеркивая актуальность и быстрое развитие тематики. Около 2% материалов — это книги, которые предоставляют вклад в развитие фундаментальной базы дисциплины. Около 5% - материалы из других источников, не попавших под приведенную классификацию (статьи в некоторых российских научных изданиях). Данные приведены на Рисунке 1:
Рисунок 1 - Анализ использованных в обзоре источников на 31.12.2024
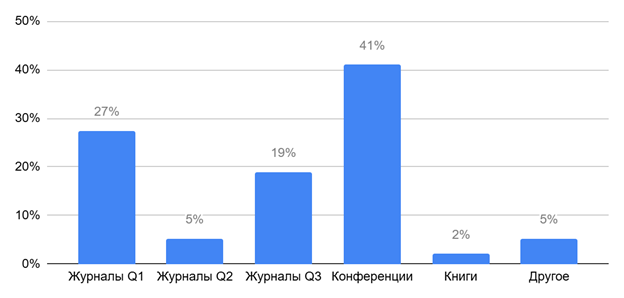
Источник: платформа IEEE
Приведенные выше данные позволяют сделать заключение о том, что сфера знаний, связанных роевым интеллектом в беспилотных летательных аппаратах, является достаточно быстро развивающейся и подтверждает актуальность ее изучения для определения перспектив диффузии ее результатов в сферу роев команд. Теперь рассмотрим собственно направления исследований в данной области на основе анализа содержания 30 наиболее цитируемых публикаций и сгруппируем основные области приложения усилий исследователей, а также актуальные для нашей цели исследования полученные результаты. Первая группа публикаций посвящена проблематике оптимизации пути передвижения роя БПЛА [15, 20, 18, 22, 23, 25, 26, 40, 41, 49]. Здесь рассматривается вопрос централизации и децентрализации принятия решений, безопасное планирование маршрутов с учетом различных моделей коммуникаций между элементами роя. Здесь интересным для нас является общий принцип, закладываемый в алгоритмы: основным источниками информации являются сигналы от соседних БПЛА. Это похоже на движение автомобилей по автотрассе, когда каждый водитель имеет карту, цель поездки и видит сигналы соседних участников движения, а также руководствуется правилами дорожного движения. Это децентрализованная система управления трафиком дорожной сети, поскольку каждое конкретное решение о движении водитель на основании вышеперечисленного принимает сам. Нам же следует понять, возможно ли перенесение этого децентрализованного управления на координацию роев команд исследователей. Сравнение обобщения с критериями из [42] позволяет заметить, что данные результаты соответствуют как минимум критерию 1 и критерию 2.
Далее выделим работы [31, 35, 39, 43, 46, 47, 48, 50]. В них рассматриваются различные аспекты передвижения роев на местности с препятствиями либо по незнакомой местности. В нашей теме с автономной координацией роев команд исследователей эта задача является актуальной, поскольку научные исследования по определению имеют дело с ранее неизвестным, и препятствия, требующие пересборки календарного плана проекта возникают в силу сути дела. Сравнение обобщения с критериями из [42] позволяет заметить, что данные результаты соответствуют как минимум критериям 1, 2 и 3.
Интерес также представляет ряд работ, основанных на переносе принципов самоуправления роев из природного мира в мир киберфизических систем [10, 19, 29, 44, 45]. Методы автономного поведения на основе роевого интеллекта в настоящее время являются одними из наиболее широко изученных алгоритмов в области планирования поведения киберфизических роевых систем. Изучены алгоритмы муравьиной колони, пчелиного роя, волчьей стаи, стаи рыб и др. Отметим также генетические алгоритмы, которые также применяются для роев технических устройств достаточно часто. В исследованиях отмечается, что алгоритмы роевого интеллекта
подвержены риску, заключающемуся в вероятности ненахождения оптимального решения из-за неопределенности, присущей настройкам начальных значений. Иными словами, критически важен верный первый шаг в реализации проекта. А это означает, что гибкость управления проектом дает возможность снять ошибку, если она заложена в самом начале процесса управления. Сравнение обобщения с критериями из [42] позволяет заметить, что данные результаты соответствуют как минимум критериям 1, 2 и 4.
В заключение обзора, отметим работы, построенных на анализе имитации физических процессов для построения алгоритмов роевого интеллекта технических систем [3, 4, 38]. В этих работах сборка роя осуществляется на основе модели кристаллической решетки. Либо описывающая движение элементов роя в виде самодвижущихся частиц активной материи. Это дает возможность применять математические методы моделирования движения роя. Сравнение обобщения с критериями из [42] позволяет заметить, что данные результаты соответствуют как минимум критерию 4.
Итак, мы выделили 4 группы исследований по роевому интеллекту в технических системах, чтобы выявить опыт, который может быть применен к управлению роями команд научно-технических проектов (что является основой для успеха применения подхода agile в данной сфере): оптимизация путей движения технических роевых систем, аспекты централизации и децентрализации принятия решений, перенос алгоритмов управления роевым движением из животного мира, перенос алгоритмов управления роевым движением из изученных физических явлений. Ни одна из перечисленных 4 групп исследований не позволяет удовлетворить всем 4 критериям, которые сигнализируют о возможной целесообрасности переноса опыта из технической в социальную сферу, согласно требованиям [42]. Но в совокупности те или иные группы исследований и их результатов отвечают всем требованиям.
В литературе уже начали появляться формулировки принципов для правил, лежащих в основе движения технических беспилотных систем именно как роевых – то есть автономного движения в составе потока других подобных транспортных средств [3]. Вот они:
1. Программно-аппаратный комплекс напрямую взаимно измеряет относительные координаты и скорости между участниками движения и наземными ориентирами. Связь осуществляется без использования третьей стороны (без GPS, без ГЛОНАСС) - габаритными огнями, стоп-сигнальными, индикаторами поворотов и аналогичных светотехнических элементов.
2. Алгоритмы и средства контроля, позволяющие выполнять сложные трехмерные манёвры в воздухе. Стыковка, дозаправка в воздухе, передача грузов с одного аппарата на другой в полёте, посадка на движущийся транспорт, уклонение от внезапно обнаруженных препятствий. Достигается методами машинного обучения с использованием искусственного интеллекта.
3. Автономная групповая работа. Групповая работа – это возможность распределить нагрузки между бортами, а не устанавливать сразу все на единственный аппарат. Пример групповой работы без автономности – шоу дронов, но такая работа сильно снижает экономический эффект, т.к. либо получается, что задание выполняется по неизменяемому сценарию от начала и до конца, либо требуется много дополнительных усилий, чтобы с земли изменить индивидуальное задание каждому беспилотнику.
4. Новый подход к созданию наземной архитектуры управления беспилотными системами. В данный момент каждый оператор осуществляет старт своего беспилотника, обеспечивает возвращение и задаёт полётное задание. Приемлемо, когда работают одиночные беспилотники. При групповой работе необходим новый язык описания полётного задания, подразумевающий групповое взаимодействие, старт с одной базы, возвращение на другую базу, получение и смену заданий в воздухе.
5. Автономные базы наземного обслуживания. Могут быть как стационарными, так и мобильными, размещенными на подвижных наземных и морских платформах. Возможен вариант воздушной базы (летающая платформа, питающаяся энергией либо от поставляемых дронами аккумуляторов, либо по кабелю с земли). При наиболее вероятных сценариях работы межполётное обслуживание дрона можно полностью автоматизировать. Чтобы обеспечить заход на посадку и саму посадку - потребуется аппаратура из первого пункта, алгоритмы из второго, диспетчеризация – из третьего и назначение конкретной базы из четвёртого.
Все пять принципов являются разворачиванием определения роевого интеллекта: децентрализованная самоорганизующаяся система, в применении к авиационным беспилотникам. Проверка на соответствие принципам переносимости результатов развития технических роевых систем на социальные роевые системы (по критериям [42]) позволит достичь междисциплинарного эффекта и найти пути повышения полезности agile-подхода в управлении научно-техническими проектами.
Заключение
Задача по управлению движением технических роевых систем сводится к обеспечению возможности автономности на основе правил, общих сигналов, воспринимаемых всеми элементами движения (как сигналы светофора на трассе, команды регулировщика и сигналы от соседних участников дорожного движения). Необходимы: общая цель всего «роя команд», децентрализованная коммуникация между командами (элементами роя), решение проблем при ситуации выхода из работы какой-либо команды. Коммуникации между командами исследователей можно налаживать на междисциплинарных мероприятиях и любых иных способов объединения людей на основе самоорганизации (включая использование коворкингового пространства, больших столовых и т.п.).
При этом требуются дополнительные исследования подходов к распределению задач для повышения автономности и масштабируемости, особенно в случае перехода к использованию крупномасштабного роя.
Данная область технических исследований может быть источником находок для развития области знаний о применении agile-подхода при управлении проектами научно-технических исследований и разработок. В первую очередь, ценность представляют идеи об организационных правилах и процедурах, способных за счет своего внедрения повлиять на культуру организации и инициировать преобразование иерархической системы в систему роя команд. Согласно имеющихся представлений теории agile-подхода, это обеспечит как эффективность формирования команд исследователей, так и их ориентацию на реализацию интересов внешнего или внутреннего потребителя (а не бюрократических требований иерархии компании). Такой подход должен выявить инструменты преобразования иерархических организаций, занимающихся исследованиями, в организованные на принципе сети (роя) команд (что позволяет эффективно использовать agile), за счет конкретных рекомендаций по правилам и процедурам, без отсылки к идеям о преобразовании организационной культуры.
References:
Agile dlya vsekh [Agile for everyone] (2019). (in Russian).
Ahmed F. (2022). Recent advances in unmanned aerial vehicles: a review Arabian Journal for Science and Engineering. 47 (7). 7963-7984.
Alhaqbani A., Kurdi H., Youcef-Toumi K. (2021). Fish-Inspired Task Allocation Algorithm for Multiple Unmanned Aerial Vehicles in Search and Rescue Missions Remote Sens. 13 27. doi: 10.3390/RS13010027.
Alotaibi F., Almudhi R. (2023). Application of Agile Methodology in Managing the Healthcare Sector IRASD Journal of Management. 5 (3). 147-160.
Babenko V. V., Telnova O. P., Babenko V. (2020). Proektnyy menedzhment v fundamentalnyh nauchnyh issledovaniyakh [Project management in fundamental scientific research]. Korporativnoe upravlenie i innovatsionnoe razvitie ekonomiki Severa: Vestnik Nauchno-issledovatelskogo tsentra korporativnogo prava, upravleniya i venchurnogo investirovaniya Syktyvkarskogo gosudarstvennogo universiteta. (2). 78-89. (in Russian).
Beck K. (2001). Manifest für agile Softwareentwicklung Zugriff am. 3 2020.
Belyaev Yu. (2022). Innovatsionnyy menedzhment [Innovation management] (in Russian).
Biely K. (2024). Agile by accident: how to apply Agile principles in academic research projects Social Sciences. 4 (1). 12.
Boyko A.M., Budza A.A., Kvasko A.G., Kostyrin P.V., Maksimov K.A., Tkachenko D.V., Shamray P.Yu. (2022). Vysokoproizvoditelnaya optoelektronnaya sistema otslezhivaniya polozheniya bespilotnyh letatelnyh apparatov (BLA) [High-performance optoelectronic position tracking system for unmanned aerial vehicles (UAVs)] Extreme Robotics. 596. (in Russian).
Boyko A.M., Girgidov R.A. (2022). Klyuchevye osobennosti algoritmov formirovaniya roya avtonomnyh bespilotnyh letatelnyh apparatov (BLA) v usloviyakh otsutstviya GNSS i ustoychivoy radiosvyazi [Key features of a swarm assemlby algorythm for autonomous unmanned aerial vehicles (UAVS) in absence of GNSS and stable radio communication]. Robototekhnika i tekhnicheskaya kibernetika. (10). 25-31. (in Russian).
Chowdhury M. M. U., Bulut E., Guvenc I. (2019). Trajectory Optimization in UAV-Assisted Cellular Networks under Mission Duration Constraint Orlando
Ciric D. (2018). Agile project management in new product development and innovation processes: challenges and benefits beyond software domain 2018 IEEE International Symposium on Innovation and Entrepreneurship (TEMS-ISIE). – IEEE. 1-9.
Conforto E. C., Amaral D. C. (2010). Evaluating an agile method for planning and controlling innovative projects Project Management Journal. 41 (2). 73-80.
Denning S. (2019). Epokha Agile: Kak umnye kompanii menyayutsya i dostigayut rezultatov [The Agile Era: How Smart Companies are Changing and Achieving Results] (in Russian).
Floriano B., Borges G. A., Ferreira H. (2019). Planning for Decentralized Formation Flight of UAV Fleets in Uncertain Environments with Dec-POMDP
Gao S., Wu J., Ai J. (2021). Multi-UAV reconnaissance task allocation for heterogeneous targets using grouping ant colony optimization algorithm Soft Comput. (25). 7155–7167. doi: 10.1007/S00500-021-05675-8/.
Hamnanaka M. (2019). Optimum Design for Drone Highway
Hidalgo E. S. (2019). Adapting the scrum framework for agile project management in science: case study of a distributed research initiative Heliyon. 5 (3).
Ho F. (2022). Multi-Agent Path Finding in Unmanned Aircraft System Traffic Management With Scheduling and Speed Variation IEEE Intelligent Transportation Systems Magazine. (5). 8-21.
Lakhani H. V. (2020). Systematic review of clinical insights into novel coronavirus (CoVID-19) pandemic: persisting challenges in US rural population International Journal of Environmental Research and Public Health. 17 (12). 4279.
Liu D., Dou L., Zhang R., Zhang X., Zong Q. (2023). Multi-Agent Reinforcement Learning-Based Coordinated Dynamic Task Allocation for Heterogenous UAVs IEEE Trans. Veh. Technol. (72). 4372–4383. doi: 10.1109/TVT.2022.3228198.
Martin A. (2023). Introduction to an agile framework for the management of technology transfer projects Procedia Computer Science. 219 1963-1968.
Pham K. (2021). Karl Marx’s Theory of the Productive Forces in the Present Fourth Industrial Revolution Journal of Social Studies Education Research. 12 (3). 101-119.
Pshikhopov V. K., Medvedev M. Y. (2018). Group Control of Autonomous Robots Motion in Uncertain Environment via Unstable Modes Spiiran. 5 (60). 39.
Rasnacis A., Berzisa S. (2017). Method for adaptation and implementation of agile project management methodology Procedia Computer Science. 104 43-50.
Senabre Hidalgo E., Fuster Morell M. (2019). Co-designed strategic planning and agile project management in academia: Case study of an action research group Palgrave Communications. 5 (1). 1-13.
Soria E., Schiano F., Floreano D. (2022). Distributed Predictive Drone Swarms in Cluttered Environments IEEE Robotics and Automation Letters. (1). 73-80.
Spangenberg J. H. (2011). Sustainability science: a review, an analysis and some empirical lessons Environmental Conservation. 38 (3). 275-287.
Sørensen E., Torfing J. (2016). Collaborative innovation in the public sector Enhancing public innovation by transforming public governance. 115-116.
Thomas A., Suresh M. (2023). Readiness for agile-sustainability in health-care organizations International Journal of Quality and Service Sciences. 15 (2). 148-167.
Udovichenko A.S. (2022). Vremya dlya razvitiya [Time for development] (in Russian).
Udovichenko A.S. (2024). Ustoychivoe razvitie pri otkaze ot prioriteta klimaticheskikh tseley: ekonomika zamknutogo tsikla i tsifrovizatsiya [Sustainable development without prioritizing climate goals: closed-loop economy and digitalization]. Informatization in the Digital Economy. 5 (4). 613-632. (in Russian). doi: 10.18334/ide.5.4.122550.
Virágh C., Vásárhelyi G., Tarcai N., Szörényi T., Somorjai G., Nepusz T., Vicsek T. (2014). Flocking algorithm for autonomous flying robots Bioinspir. Biomim. (9). 025012. doi: 10.1088/1748-3182/9/2/025012.
Wang F. (2023). AGDS: Adaptive Goal-Directed Strategy for Swarm Drones Flying Through Unknown Environments Complex & Intelligent Systems. (2). 2065-2080.
Wang J., Jia G., Lin J., Hou Z. (2020). Cooperative task allocation for heterogeneous multi-UAV using multi-objective optimization algorithm J. Cent. South Univ. (27). 432-448. doi: 10.1007/s11771-020-4307-0.
Wang Z., Li J., Li J., Liu C. (2024). A decentralized decision-making algorithm of UAV swarm with information fusion strategy Expert Syst. Appl. (237). 121444. doi: 10.1016/J.ESWA.2023.121444.
Wingate L. M. (2025). Project management for research and development: Guiding innovation for positive R&D outcomes
Xu Guangtong, Wang Zhu (2021). Distributed Sequential Convex Programming for Trajectory Planning of UAV Swarms with Dynamic Priority Decoupling Acta Aeronautica et Astronautica Sinica. (2). 325059–325059.
Yan F., Chu J., Hu J., Zhu X. (2024). Cooperative task allocation with simultaneous arrival and resource constraint for multi-UAV using a genetic algorithm Expert Syst. Appl. (245). 123023. doi: 10.1016/J.ESWA.2023.123023.
Yan X., Chen R. (2024). Application Strategy of Unmanned Aerial Vehicle Swarms in Forest Fire Detection Based on the Fusion of Particle Swarm Optimization and Artificial Bee Colony Algorithm Appl. Sci. 14 4937. doi: 10.3390/APP14114937.
Yasin J. N. (2019). Formation Maintenance and Collision Avoidance in a Swarm of Drones Amsterdam
Yasin J. N. (2020). Energy-Efficient Formation Morphing for Collision Avoidance in a Swarm of Drones IEEE Access. (8). 170681–170695.
Yasin J. N., Demazeau Y. (2020). Navigation of Autonomous Swarm of Drones Using Translational Coordinates
ZHANG, Z., JIANG, J., XU, H., ZHANG, W.A. (2024). Distributed dynamic task allocation for unmanned aerial vehicle swarm systems: A networked evolutionary game-theoretic approach Chinese J. Aeronaut. (37). 182–204. doi: 10.1016/J.CJA.2023.12.027.
Zhou Shaolei, Qi Yahui (2016). Time-Varying Formation Control of UAV Swarm System with Switching Topology Acta Aeronautica et Astronautica Sinica. (4). 320452–320452.
Страница обновлена: 31.05.2025 в 04:51:46