Application of synergetic management methods in the study of the Supply and Demand Dynamic System
Batishcheva G.A.1![]() , Bratishchev A.V.2
, Bratishchev A.V.2![]()
1 Ростовский государственный экономический университет (РИНХ), Russia
2 Донской государственный технический университет, Russia
Download PDF | Downloads: 11
Journal paper
Informatization in the Digital Economy (РИНЦ, ВАК)
опубликовать статью | оформить подписку
Volume 4, Number 2 (April-June 2023)
Indexed in Russian Science Citation Index: https://elibrary.ru/item.asp?id=54118718
Abstract:
The article provides a complete bifurcation analysis of the mathematical model of the Supply and Demand Dynamic System. Based on the theoretical analysis and numerical experiment in the Matlab+Simulink package, all phase portraits of the system were obtained; and an additive control system for the interaction of supply and demand was built. A class of permissible achievable states of the dynamic system under study is particularized. With the help of the constructed model, it is possible to make a forecast of the development of the process under consideration at any initially specified state of the system.
Keywords: supply and demand, equilibrium state, phase portrait, stability, aggregated variable, synergetic regulator
JEL-classification: J2, Q11, Q21, Q31, Q41
Введение. Актуальность моделирования взаимосвязи спроса и предложения определяется тем, что в экономике важнейшими параметрами рынка являются спрос, предложение и равновесная цена, изменение соотношения между которыми вызывает колебания рыночных цен вокруг равновесной цены, следствием которых является формирование такого уровня цен, при котором достигается состояние равновесия спроса и предложения.
Материалы и методы. В работах [3, 16–18] (Bratishchev, Batishcheva, Zhuravleva, Guzenko, 2020; Bratishchev, Batishcheva, Zhuravleva, 2019; Bratishchev, Batishcheva, Denisov, Zhuravleva, 2020; Batishcheva, Zhuravleva, Rogozhin, 2022) с помощью качественной теории динамических систем [1, 4] (Bautin, Leontovich, 1990; Bratishchev, 2015) и теории синергетического управления [10] (Kolesnikov, 2006) исследованы нелинейные математические модели производства и обмена и управления посреднической деятельностью. Решение данных задач выполнено с помощью использования систем дифференциальных уравнений [2, 8] (Bakanov, Melnik, Sheremet, 2007; Gerasimov, Puchkov, Protasov, 2010), рассмотренных в работах В.П. Милованова [12–14] (Milovanov, 2001; Milovanov, 2010; Milovanov, 2011).
В настоящей статье для решения поставленной задачи моделирования динамической системы «Предложение и спрос» указанными выше методами рассматривается математическая модель, которая имеет вид [13] (Milovanov, 2010):
 . (1)
. (1)
Здесь
![]() предложение
производителя, то есть количество товара, находящееся в распоряжении производителя
в момент времени
предложение
производителя, то есть количество товара, находящееся в распоряжении производителя
в момент времени ![]() ;
;
![]() спрос
потребителя, то есть объем денежной массы потребителя, предназначенный для
приобретения товара
спрос
потребителя, то есть объем денежной массы потребителя, предназначенный для
приобретения товара ![]() .
.
Скорость изменения (роста или снижения) предложения определяется в работе влиянием следующих четырех факторов:
![]() моральная
и физическая изнашиваемость товара;
моральная
и физическая изнашиваемость товара;
![]() наличие
денежной массы у потребителя;
наличие
денежной массы у потребителя;
![]() ухудшение
качества выпущенного товара с течением времени;
ухудшение
качества выпущенного товара с течением времени;
![]() раскупаемость
товара.
раскупаемость
товара.
Скорость изменения (роста или снижения) спроса определяется в работе влиянием следующих двух факторов:
![]() количество
товара у производителя;
количество
товара у производителя;
![]() сбыт
товара.
сбыт
товара.
Параметры предполагаются произвольными положительными числами.
Для исследования модели (1) авторами проведен полный бифуркационный анализ системы [1] (Bautin, Leontovich, 1990).
Результаты и обсуждение. Анализ конечных состояний равновесия. Исходя из экономического смысла в работе рассмотрена первая четверть фазовой плоскости.
Система (1) имеет 3 состояния равновесия:
 .
.
Применив
теорему Ляпунова об устойчивости по первому приближению [11] (Malkin, 1966), устанавливаем, что независимо от значений параметров ![]() всегда является седлом и грубым состоянием равновесия,
всегда является седлом и грубым состоянием равновесия, ![]() – является грубым устойчивым узлом, а
– является грубым устойчивым узлом, а ![]() – грубым неустойчивым узлом. Этот результат подтверждается численно (рис. 1),
построением с помощью математического пакета Matlab+Simulink фазового портрета в окрестности этих состояний для конкретных
значений параметра [6, 7, 15] (Bratishchev, 2012; Vasilev,
Simak, Rybnikova, 2008; Gerasimov, Regeda, Regeda, 2017).
– грубым неустойчивым узлом. Этот результат подтверждается численно (рис. 1),
построением с помощью математического пакета Matlab+Simulink фазового портрета в окрестности этих состояний для конкретных
значений параметра [6, 7, 15] (Bratishchev, 2012; Vasilev,
Simak, Rybnikova, 2008; Gerasimov, Regeda, Regeda, 2017).
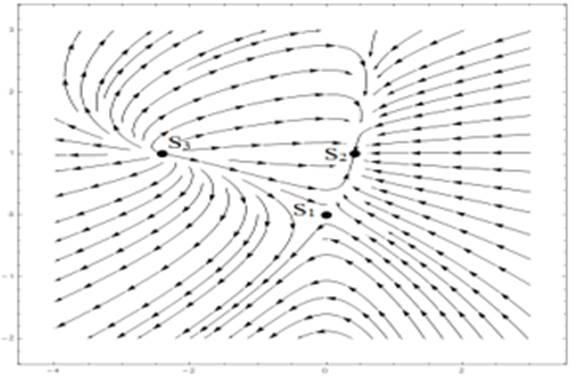
Рисунок 1. Фрагмент фазовой плоскости системы (1)
Источник: построен авторами по результатам исследования.
Вывод. Учитывая, что квадратичная система (1) может иметь только предельные циклы, окружающие единственную особую точку, которая является фокусом, а также не более двух фокусов в конечной части плоскости [19], заключаем, что рассматриваемая система циклов не имеет.
Анализ состояний равновесия на бесконечности. Построение схемы [1] (Bautin, Leontovich, 1990) полиномиальной автономной системы (1) подразумевает исследование состояний равновесия на бесконечности. Последнее проведем с помощью преобразования Пуанкаре.
Для
определения характера возможных состояний равновесия ![]() применяется
такое преобразование Пуанкаре [1] (Bautin, Leontovich,
1990):
применяется
такое преобразование Пуанкаре [1] (Bautin, Leontovich,
1990): ![]() .
Система (1) при этом переходит в систему (2):
.
Система (1) при этом переходит в систему (2):
 . (2)
. (2)
Приравнивая
к нулю правые части, находим два состояния равновесия ![]() и
и 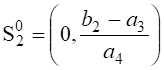 ,
причем
они сливаются,
когда
,
причем
они сливаются,
когда
![]() .
.
На
основании теоремы Ляпунова об устойчивости по первому приближению заключаем,
что в случае ![]() состояние
состояние
![]() является
неустойчивым узлом, в случае
является
неустойчивым узлом, в случае ![]() будет
седлом. Аналогично, в случае
будет
седлом. Аналогично, в случае ![]() второе
состояние будет
седлом, а в случае
второе
состояние будет
седлом, а в случае ![]() оно
будет неустойчивым узлом.
оно
будет неустойчивым узлом.
Отдельно
рассматривается случай кратного состояния равновесия, когда ![]() . В этом
случае систему (2) необходимо привести к каноническому виду и воспользоваться
теоремой о кратном положении равновесия [1] (Bautin,
Leontovich, 1990). Данное состояние оказывается
неустойчивым седло-узлом.
. В этом
случае систему (2) необходимо привести к каноническому виду и воспользоваться
теоремой о кратном положении равновесия [1] (Bautin,
Leontovich, 1990). Данное состояние оказывается
неустойчивым седло-узлом.
Для
определения характера возможных состояний равновесия ![]() применяется
преобразование Пуанкаре [1] (Bautin, Leontovich, 1990)
вида
применяется
преобразование Пуанкаре [1] (Bautin, Leontovich, 1990)
вида ![]() .
Система (1) при этом переходит в систему (3):
.
Система (1) при этом переходит в систему (3):
 . (3)
. (3)
Приравнивая
к нулю правые части, находим 2 состояния равновесия: ![]() и
и 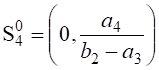 .
.
Вывод. Состояния
равновесия ![]() и
и
![]() определяют и
определяются одним и тем же состоянием равновесия на бесконечности автономной
системы (1). Состояние равновесия
определяют и
определяются одним и тем же состоянием равновесия на бесконечности автономной
системы (1). Состояние равновесия ![]() является
кратным. Тем же методом устанавливается, что оно будет устойчивым седлоузлом.
является
кратным. Тем же методом устанавливается, что оно будет устойчивым седлоузлом.
Полный бифуркационный анализ системы. Перейдем к полному описанию фазовых портретов системы (1).
Напомним, что схемой называются сведения о характере состояний равновесия,
предельных циклах и ходе сепаратрис фазового портрета автономной
системы [1] (Bautin, Leontovich, 1990).
Схема позволяет получить схематическое изображение всех фазовых портретов. Для системы (1) их оказывается 3 в зависимости от
значений параметров ![]() и
и
![]() . Привлечение
пакета Matlab+Simulink
понадобилось для того, чтобы с помощью численных экспериментов
понять, какие состояния связывают сепаратрисы. В результате было получено такое
схематическое разбиение фазовых пространств на элементарные ячейки, являющиеся
инвариантными множествами (рис. 2–4).
. Привлечение
пакета Matlab+Simulink
понадобилось для того, чтобы с помощью численных экспериментов
понять, какие состояния связывают сепаратрисы. В результате было получено такое
схематическое разбиение фазовых пространств на элементарные ячейки, являющиеся
инвариантными множествами (рис. 2–4).

Рисунок 2. Фазовый портрет, ![]()
Источник: построен авторами по результатам исследования.
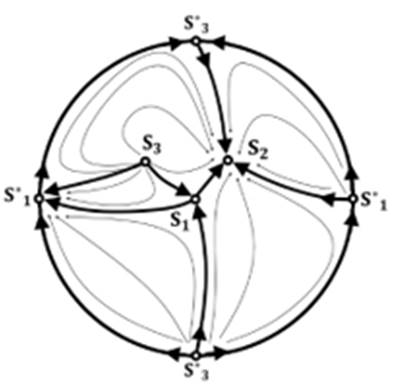
Рисунок 3. Фазовый портрет, ![]()
Источник: построен авторами по результатам исследования.

Рисунок 4. Фазовый портрет, ![]()
Источник: построен авторами по результатам исследования.
Вывод. Все траектории каждой такой ячейки асимптотически ведут себя одинаковым образом. Это знание позволяет качественно описать развитие во времени рассматриваемого экономического двумерного процесса по его начальному состоянию.
Построение синергетического регулятора системы (1). Синергетическое управление взаимосвязанными процессами спроса и предложения состоит в том [10] (Kolesnikov, 2006), чтобы заставить изменяться этот двумерный процесс по определенному закону, например, стабилизироваться в наперед заданном состоянии вне зависимости от начального его состояния. Это достигается с помощью аддитивного управления скоростью изменения какого-либо из этих процессов (4):
 (4)
(4)
Функция управления ![]() определяется функцией (агрегированной переменной)
определяется функцией (агрегированной переменной) ![]() , задающей инвариантное
множество
, задающей инвариантное
множество ![]() проектируемой управляемой системой,
называемой еще синергетическим регулятором. Это множество предполагается
притягивающим в том смысле, что на траекториях проектируемого регулятора
агрегированная переменная
проектируемой управляемой системой,
называемой еще синергетическим регулятором. Это множество предполагается
притягивающим в том смысле, что на траекториях проектируемого регулятора
агрегированная переменная ![]() стремится к нулю. Поэтому состояния равновесия регулятора должны
лежать на пересечении кривых
стремится к нулю. Поэтому состояния равновесия регулятора должны
лежать на пересечении кривых ![]() и
и ![]() .
То
есть на выбор агрегированной переменной накладывается условие
трансверсальности.
.
То
есть на выбор агрегированной переменной накладывается условие
трансверсальности.
Пусть условие притягиваемости представлено в виде дифференциального
уравнения с устойчивым состоянием равновесия (0,0), например, ![]() ,
где величина
,
где величина ![]() определяет
скорость приближения
определяет
скорость приближения ![]() к
нулю [10] (Kolesnikov, 2006). Тогда дифференцируя это уравнение, получаем
недостающее уравнение регулятора.
к
нулю [10] (Kolesnikov, 2006). Тогда дифференцируя это уравнение, получаем
недостающее уравнение регулятора.
Так как требуемое состояние обязано лежать и на кривой, задаваемой неизменяемой правой частью исходной системы, то потенциальными терминальными состояниями могут быть только точки последней кривой. Это значит, что для решения поставленной задачи необходимо варьировать и параметры правой части ai (или bj) исходной системы. Нередко удается с помощью изменения одного или нескольких параметров покрыть графиками соответствующих кривых всю первую четверть (точки которой и имеют экономический смысл). Если при этом удается доказать, что любое терминальное состояние устойчиво, то можно считать, что задача синергетического управления системой решена.
Применим эти соображения к нашей системе.
Сначала будем управлять скоростью изменения x(t). Терминальные состояния должны лежать на кривой ![]() .
Ограничиваясь ненулевыми состояниями, имеем горизонтальную полупрямую
.
Ограничиваясь ненулевыми состояниями, имеем горизонтальную полупрямую  в первой
четверти. Нужно выбрать агрегированную переменную с параметром, чтобы при
изменении последнего соответствующими кривыми пересекались все точки полупрямой,
а также чтобы получаемые терминальные состояния регулятора были устойчивы [9] (Zubov, 1984). Простейшее семейство имеет вид
в первой
четверти. Нужно выбрать агрегированную переменную с параметром, чтобы при
изменении последнего соответствующими кривыми пересекались все точки полупрямой,
а также чтобы получаемые терминальные состояния регулятора были устойчивы [9] (Zubov, 1984). Простейшее семейство имеет вид ![]() . На траекториях проектируемого регулятора оно должно удовлетворять
уравнению
. На траекториях проектируемого регулятора оно должно удовлетворять
уравнению ![]() ,
где величина
,
где величина ![]() определяет
скорость сближения траекторий регулятора с многообразием
определяет
скорость сближения траекторий регулятора с многообразием ![]() .
Продифференцируем это выражение, заменим
.
Продифференцируем это выражение, заменим ![]() на
на
![]() и
разрешим его относительно
и
разрешим его относительно ![]() .
Получим
.
Получим
 . Объединяя
это уравнение с первым уравнением системы (1), получаем такое уравнение
регулятора:
. Объединяя
это уравнение с первым уравнением системы (1), получаем такое уравнение
регулятора:
 .
.
Разрешая
систему  , получаем следующее
ненулевое состояние равновесия:
, получаем следующее
ненулевое состояние равновесия:  .
Очевидно, при
.
Очевидно, при ![]() пробегаются
все точки полупрямой из первой
четверти.
пробегаются
все точки полупрямой из первой
четверти.
Проверим условие устойчивости этого состояния [5, 9] (Bratishchev, 2017; Zubov, 1984).
 .
.
Оно
выполняется именно при ![]() .
.
Нами
проведена верификация последнего результата с помощью проектирования S-модели
регулятора (2) и построения при ![]() фазового
портрета регулятора в окрестности его состояния равновесия. Видно (рис. 5),
что все траектории фазового портрета стягиваются к терминальному состоянию
(1,1).
фазового
портрета регулятора в окрестности его состояния равновесия. Видно (рис. 5),
что все траектории фазового портрета стягиваются к терминальному состоянию
(1,1).
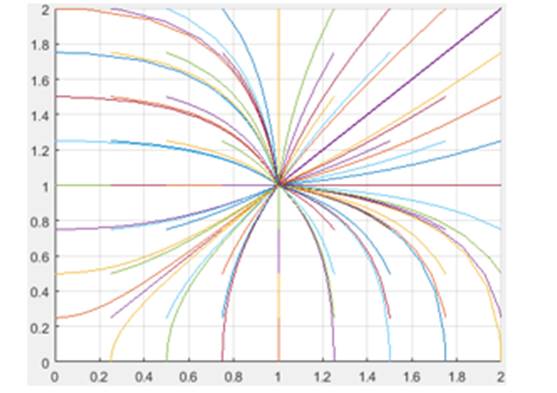
Рисунок 5. Фрагмент фазового портрета в окрестности терминального состояния
Источник: построен авторами по результатам исследования.
Замечание. Итак, любое допустимое терминальное состояние имеет вид
 .
Поэтому, если мы хотим, чтобы наперед заданная точка первой четверти
.
Поэтому, если мы хотим, чтобы наперед заданная точка первой четверти ![]() была терминальным
состоянием регулятора с агрегированной переменной
была терминальным
состоянием регулятора с агрегированной переменной ![]() , надо
сначала выбрать
, надо
сначала выбрать ![]() такими,
чтобы
такими,
чтобы  , а затем
выбрать параметр
, а затем
выбрать параметр  .
.
Найдем
теперь аддитивное управление скоростью изменения переменной ![]() . График гиперболы
. График гиперболы
![]() подсказывает
такой выбор агрегированной переменной:
подсказывает
такой выбор агрегированной переменной: ![]() , так как
семейство соответствующих кривых трансверсально этой кривой. Аналогичным
образом получаем следующее уравнение регулятора:
, так как
семейство соответствующих кривых трансверсально этой кривой. Аналогичным
образом получаем следующее уравнение регулятора:
 .
.
Состояние равновесия последнего равно:
 .
.
Проверим условие устойчивости этого состояния:
 .
.
Выводы.
1.
Таким образом, терминальное состояние регулятора устойчиво при  . По
экономическому смыслу нас интересуют значения
. По
экономическому смыслу нас интересуют значения ![]() . 2.
Если мы хотим, чтобы наперед заданная точка первой четверти
. 2.
Если мы хотим, чтобы наперед заданная точка первой четверти ![]() была
терминальным состоянием регулятора, то сначала подбираем такие положительные значения
параметров
была
терминальным состоянием регулятора, то сначала подбираем такие положительные значения
параметров ![]() ,
чтобы выполнялось равенство
,
чтобы выполнялось равенство ![]() .
А затем образуем агрегированную переменную
.
А затем образуем агрегированную переменную ![]() , где
, где ![]() (или
из предыдущего равенства следует
(или
из предыдущего равенства следует ![]()
Устойчивость этого состояния проверяется также численным экспериментом.
Заключение. Проведенный численный эксперимент свидетельствует об устойчивости в целом состояния системы. Рассмотренная математическая модель динамической системы «Спрос и предложение» дает возможность строить прогнозы динамики взаимосвязи спроса и предложения при любых заданных начальных состояниях системы с целью достижения динамического равновесия.
References:
Bakanov M.I., Melnik M.V., Sheremet A.D (2007). Teoriya ekonomicheskogo analiza [Theory of economic analysis] M.: Finansy i statistika. (in Russian).
Batishcheva G.A., Zhuravleva M.I, Rogozhin S.V. (2022). Mathematical model of production and exchange: bifurcation analysis and management 11th international conference on theory and application of soft computing, computing with words and perceptions and artificial intelligence - icsccw-2021. 488-495. doi: 10.1007/978-3-030-92127-9_66.
Bautin N.N., Leontovich E.A. (1990). Metody i priyomy kachestvennogo issledovaniya dinamicheskikh sistem na ploskosti [Methods and techniques for qualitative study of dynamical systems on the plane] M.: Mir. (in Russian).
Bratischev A.V. (2012). Rukovodstvo k rabote s paketami MATLAB i SIMULINK. Elementy proektirovaniya i analiza [A Guide to Working with MATLAB and SIMULINK Packages. Elements of Design and Analysis] Rostov n/D: Izdatelskiy tsentr DGTU. (in Russian).
Bratischev A.V. (2015). Matematicheskaya teoriya upravlyaemyh dinamicheskikh sistem. Vvedenie v ponyatiya i metody [Mathematical theory of controllable dynamical systems. Introduction to concepts and methods] Rostov n/D: Izdatelskiy tsentr DGTU. (in Russian).
Bratischev A.V. (2017). O kharakteristicheskom mnogochlene sostoyaniya ravnovesiya avtonomnoy sistemy, imeyushchey prityagivayushchee invariantnoe mnogoobrazie [On the characteristic polynomial of an equlibrium state of an autonomous system having an attracting invariant manifold]. Differentsialnye uravneniya i protsessy upravleniya. (2). 15-23. (in Russian).
Bratischev A.V., Batischeva G.A., Zhuravleva M.I., Guzenko N.V. (2020). Matematicheskaya model upravleniya predlozheniem i sprosom [Mathematical model of supply and demand management]. Intellektualnye resursy - regionalnomu razvitiyu. (2(64)). 87-91. (in Russian).
Bratishchev A.V., Batishcheva G.A., Denisov M.Y., Zhuravleva M.I. (2020). Bifurcation Analysis and Synergetic Control of a Dynamic System with Several Parameters Advances in Intelligent Systems and Computing. 1095 639-646. doi: 10.1007/978-3-030-35249-3_82.
Bratishchev A.V., Batishcheva G.A., Zhuravleva M.I. (2019). Bifurcation analysis and synergetic management of the dynamic system “Intermediary activity” Advances in intelligent systems and computing. 896 659-667. doi: 10.1007/978-3-030-04164-9_86.
Gerasimov A.I., Regeda V.V., Regeda O.N. (2017). Modelirovanie v srede MATLAB-Simulink: metod. ukazaniya k laboratornym rabotam [Modeling in MATLAB-Simulink: instructions for laboratory work] Penza: Izd-vo PGU. (in Russian).
Gerasimov B.I., Puchkov N.P., Protasov D.N. (2010). Differentsialnye dinamicheskie modeli [Differential dynamic models] Tambov: Izd-vo GOU VPO TGTU. (in Russian).
Kolesnikov A.A. (2006). Sinergeticheskie metody upravleniya slozhnymi sistemami. Teoriya sistemnogo analiza [Synergetic methods of managing complex systems. The theory of systems analysis] M.: KomKniga. (in Russian).
Malkin I.G. (1966). Teoriya ustoychivosti dvizheniya [Stability of motion theory] M.: Nauka. (in Russian).
Milovanov V.P. (2001). Neravnovesnye sotsialno-ekonomicheskie sistemy: sinergetika i samoorganizatsiya. samoorganizatsiya [Nonequilibrium Socio-Economic Systems: Synergetics and Self-Organization.] M.: URSS. (in Russian).
Milovanov V.P. (2010). Sinergetika i samoorganizatsiya: Sotsialno-ekonomicheskie sistemy [Synergetics and Self-Organization: Social and Economic Systems] M.: Knizhnyy dom «LIBROKOM». (in Russian).
Milovanov V.P. (2011). Sinergetika i problema sluchaynosti v tochke bifurkatsii [Synergetics and the Problem of Randomness at the Bifurcation Point]. Ekonomicheskaya sinergetika: Modernizatsiya ekonomiki Rossii. (13). 105-116. (in Russian).
Vasilev V.V., Simak L.A., Rybnikova A.M. (2008). Matematicheskoe i kompyuternoe modelirovanie protsessov i sistem v crede MATLAB/SIMULINK [Mathematical and computer modeling of processes and systems in MATLAB/SIMULINK environment] K.: NAN Ukrainy. (in Russian).
Zubov V.P. (1984). Ustoychivost dvizheniya. Metody Lyapunova i ikh primenenie [Stability of motion. Lyapunov's methods and their application] M.: Vysshaya shkola. (in Russian).
Подробнее об авторах:
Батищева Галина Андреевна Russia
Russia
профессор кафедры фундаментальной и прикладной математики, доктор экономических наук, доцент
Ростовский государственный экономический университет (РИНХ)
ORCID: 0000-0003-0492-8386
SPIN (elibrary.ru): 4245-4251
Братищев Александр ВасильевичRussia
профессор кафедры прикладной математики, доктор физико-математических наук, доцент
Донской государственный технический университет
ORCID: 0000-0002-3170-8672
SPIN (elibrary.ru): 8859-4520
Страница обновлена: 31.01.2025 в 07:17:20